Testes funcionais
Em meados de Setembro, já tinha todos os blocos prontos no que diz respeito às partes lógicas do bicopter.
Nesta foto, já estava decidido a forma de como iria proceder à montagem dos motores e respectivos servos.
Os testes estavam a ser feitos com o meu Arduino Duemilanove, pois não fazia ainda sentido ligar tudo de forma definitiva.
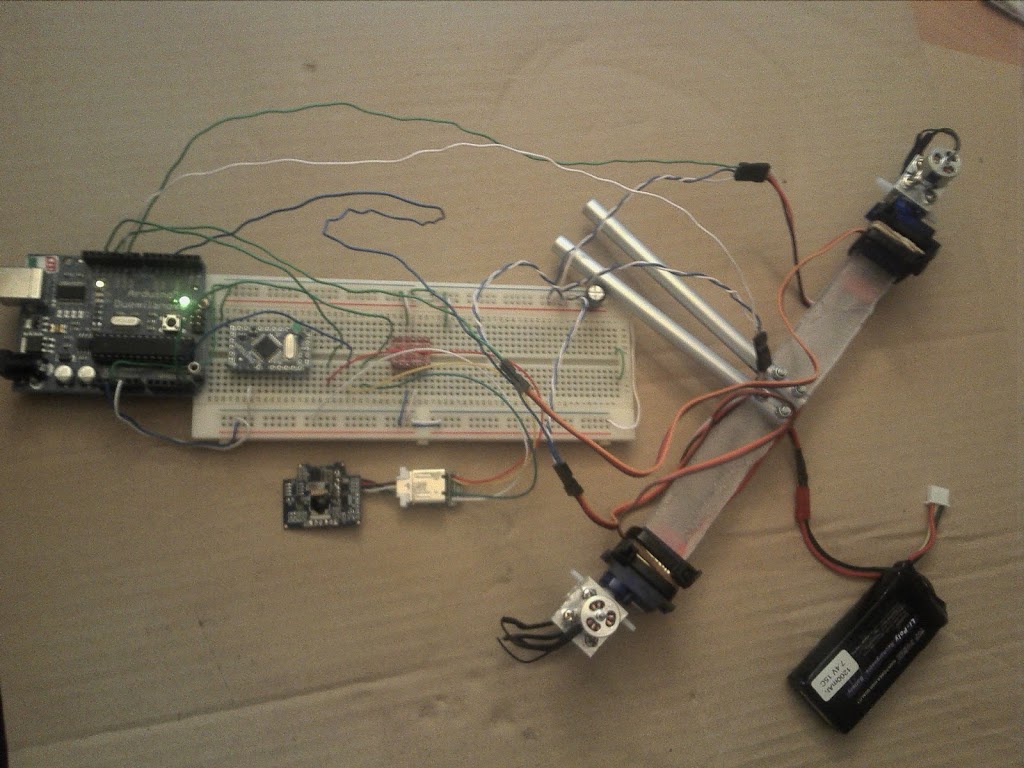
Esta montagem tinha duas das peças mais intricadas que eu fabriquei até à data, tudo feito manualmente sem recurso a torre de furação, nem a torno.
Recentemente tirei uma foto a uma destas peças, para testar uma lente macro.

Nesta altura, só tinha o software MultiWii convencional instalado no Arduino, mas sem qualquer forma de controlo.
Apercebi-me então de que havia problemas graves com o modo bi-copter, pois havia uma enorme instabilidade no controlo dos servos.
Esta instabilidade foi o que invariavelmente fez com que o bicopter acabasse por não conseguir descolar do chão.